
I am a Research Officer at the Agency for Defense Development,
Korea's national defense R&D agency (similar to DARPA), and a First Lieutenant in the Republic of Korea Army.
I received my B.S. in Computing with a minor in Physics from KAIST.
My research aims to build physics-accurate and cost-efficient generative AI systems
by combining principled mathematical analysis with practical algorithm design.
Publications
ICML Workshop CTB 2026
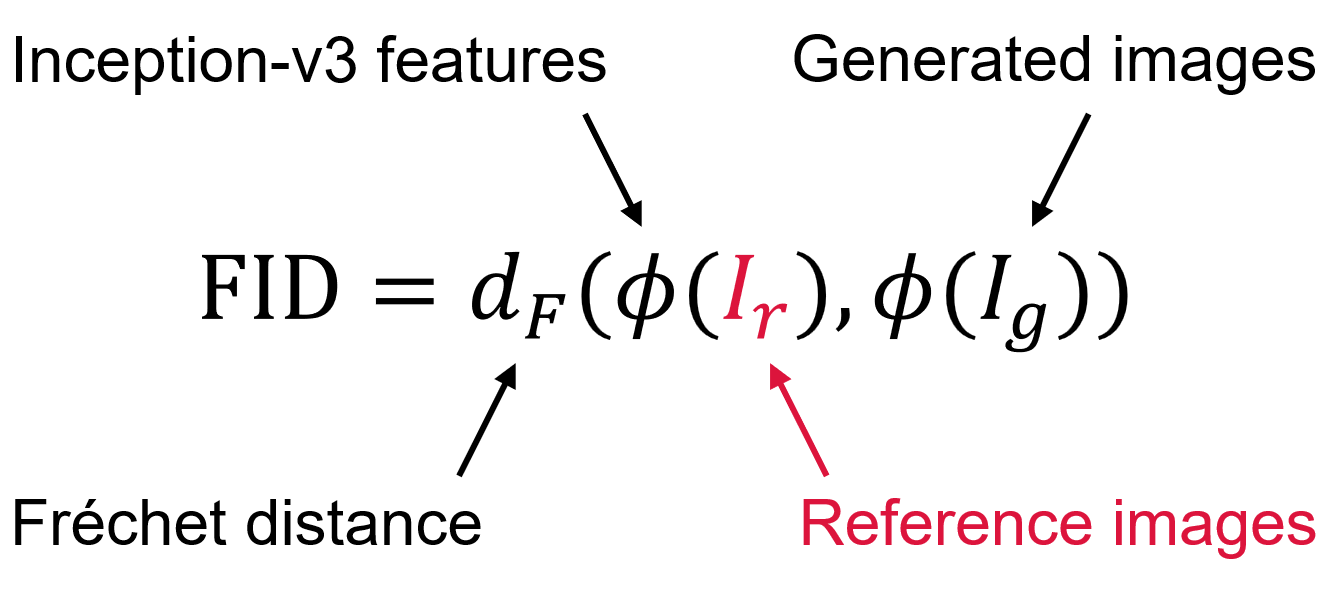
Rethinking FID Through the Geometry of the Reference Dataset
Yunghee Lee, Byeonghyun Pak
Reference dataset geometry significantly moderates FID, so distributional metrics should be reported alongside dataset geometry.
CVPR Workshop PVUW 2026
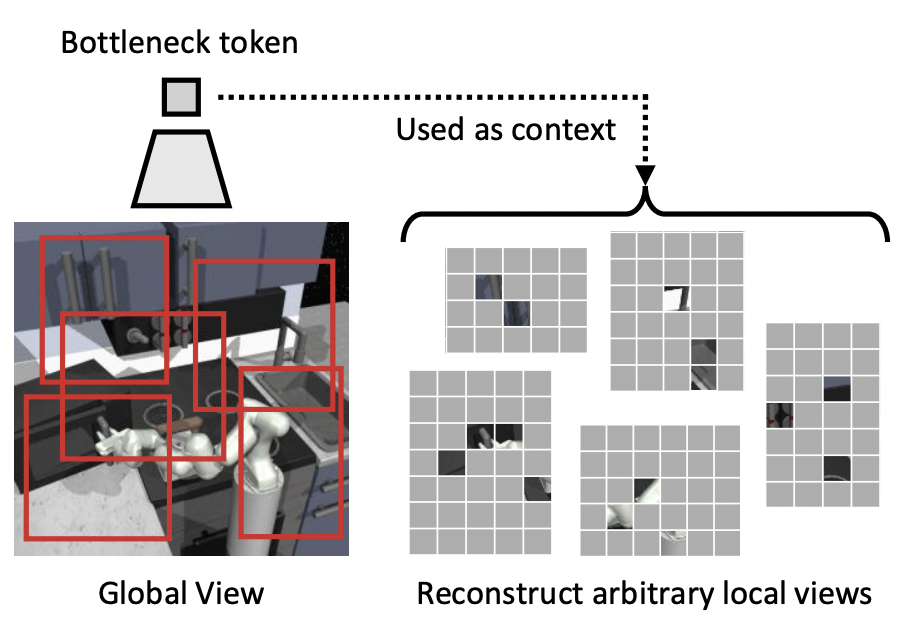
Pixel-level Scene Understanding in One Token: Visual States Need What-is-Where Composition
Seokmin Lee, Yunghee Lee, Byeonghyun Pak, Byeongju Woo
CroBo learns compact visual states that capture what-is-where pixel-level scene composition, enabling stronger what-moves-where dynamic scene understanding.
CVPR Workshop ECV 2024
Oral Presentation
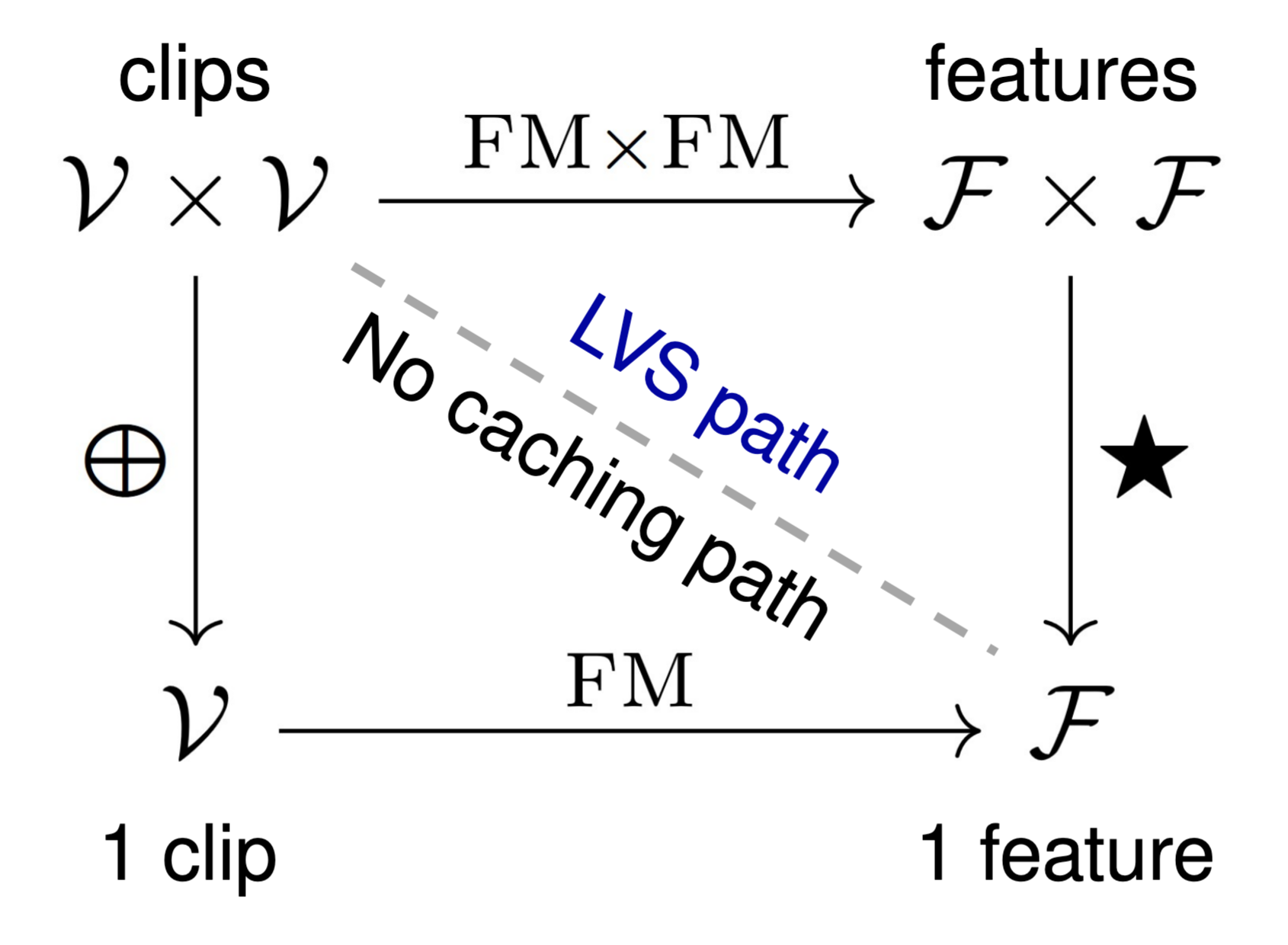
LVS: A Learned Video Storage for Fast and Efficient Video Understanding
Yunghee Lee, Jongse Park
LVS memoizes feature vectors for already-seen video clips and reuses them for future video understanding queries.
IEEE Robotics Autom. Lett. (RA-L) 2023
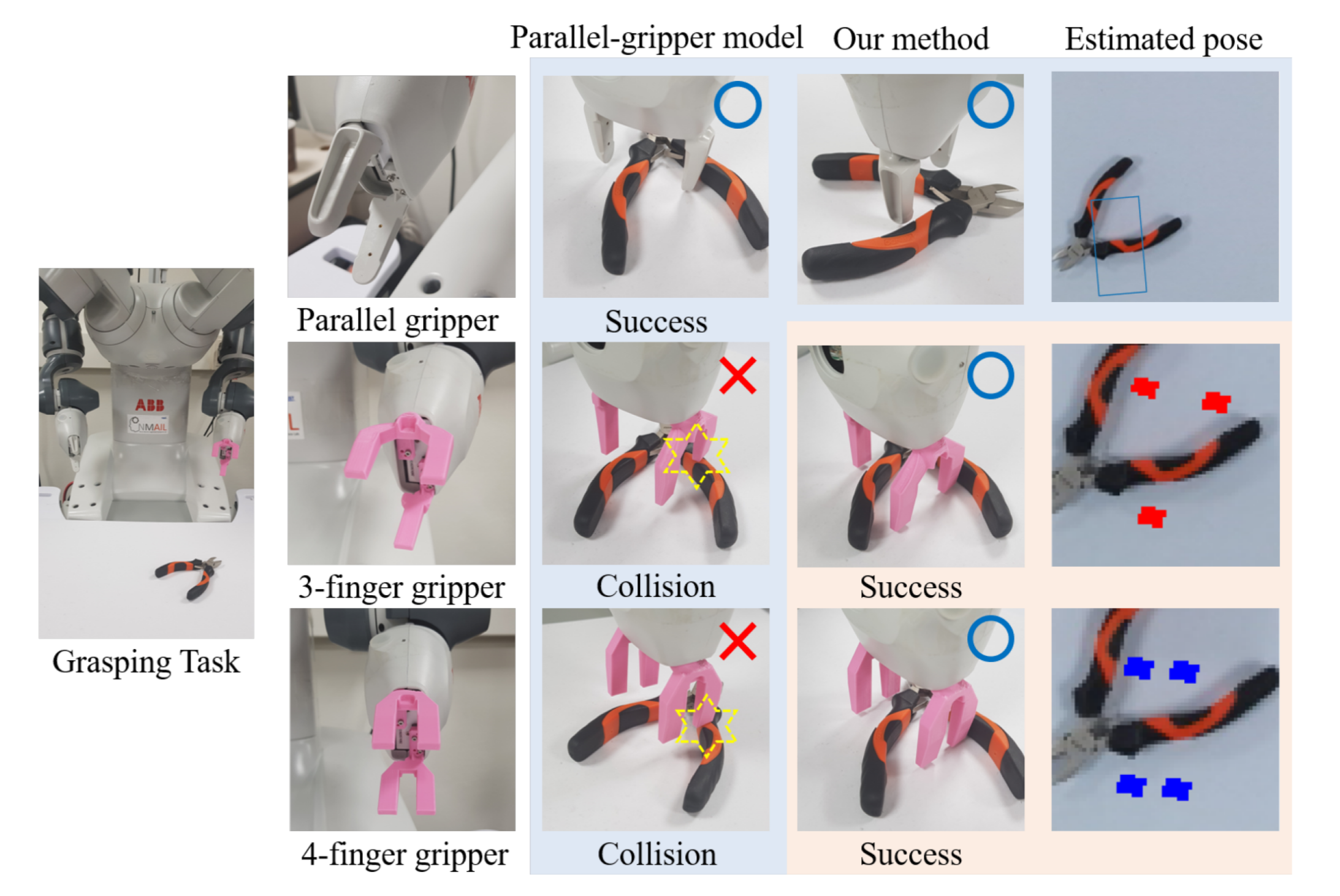
HybGrasp: A Hybrid Learning-to-Adapt Architecture for Efficient Robot Grasping
Jungwook Mun, Khang Truong Giang, Yunghee Lee, Nayoung Oh, Sejoon Huh, Min Kim, Sungho Jo
HybGrasp efficiently learns to adapt to different gripper designs by refining the base pose with lightweight modules.
Experience
Agency for Defense Development (ADD)
Research Officer, Manager: Dr. Eunjin Koh, Advisor: Dr. Hoseong Kim
- Developed data storage and retrieval systems for surveillance UAVs.
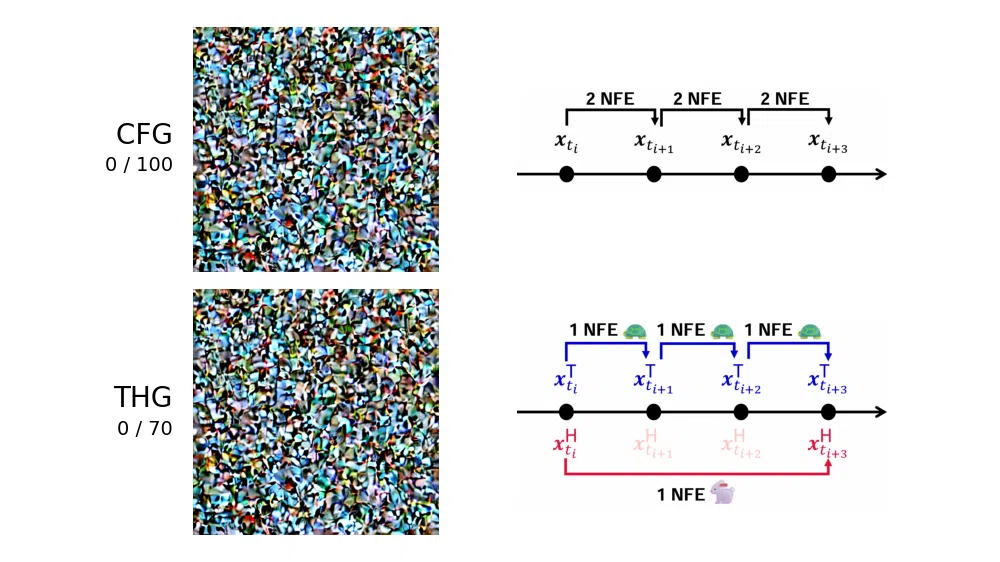
- Worked on diffusion models for infrared image generation. [NeurIPS 2025]
Computer Architecture and Systems Lab @ KAIST
Undergraduate Research Intern, Advisor: Prof. Jongse Park
- Worked on efficient video understanding systems. [CVPRW 2024]
Neuro-Machine Augmented Intelligence Lab @ KAIST
Undergraduate Research Intern, Advisor: Prof. Sungho Jo
- Worked on robot grasping for various gripper designs. [RA-L 2023]
Education
Korea Advanced Institute of Science and Technology (KAIST)
B.S. in Computing, Summa Cum Laude